运动控制器是移动机器人的控制中枢,主要实现执行机构精确的位置控制、速度控制、力/力矩控制等。运动控制器由硬件及软件两部分组成,常见的运动控制器从硬件结构上主要分为:基于MCU的运动控制器、基于PLC的运动控制器、基于IPC的运动控制器等。此外,导航控制器、网络控制器等新型运动控制器也越来越多地应用在移动机器人上。计算能力、存储能力、接口种类及数量等是衡量运动控制器性能优劣的关键指标。
一、基于MCU的运动控制器
微控制单元(MCU),又称单片微型计算机或者单片机,是把CPU的频率与规格做适当缩减,并将内存、计数器、USB、A/D转换、UART、PLC、DMA等周边接口,甚至把LCD驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。
基于单片机的控制器把MCU嵌入到控制器中,能够独立运行。而且其带有通用接口方式,方便与其他设备通讯。基于MCU的控制器具有运行性能良好、系统的成本低等优势。
单片机
二、基于PLC的运动控制器
PLC(可编程逻辑控制器)是专为在工业环境下应用而设计的数字运算操作电子系统。它采用一种可编程的存储器,在其内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,通过数字式或模拟式的输入输出来控制各种类型的机械设备或生产过程。
基于PLC的控制器技术成熟、编程方便,在可靠性、扩展性、对环境的适应性方面具有明显优势,并且有体积小、开发周期短、方便安装维护、互换性强等优点。但是,基于PLC的控制器不能进行复杂的数据处理,也不支持复杂算法的部署,不能实现多轴联动等复杂的运动轨迹。

PLC控制器
三、基于IPC的运动控制器
工控机(IPC)一般称为工业控制计算机,是专门用于对设备、流程、参数等进行监测与控制的计算机。IPC的基本性能及相容性与商用电脑相差无几,但IPC更注重在不同环境下的稳定性、可靠性。
基于IPC(工控机)的控制器是移动机器人控制系统的应用主流。由于计算机平台的使用,为动态控制算法和复杂轨迹规划提供了良好的硬件保障。这类控制器的软件开发成本低、系统兼容性好、系统可靠性强、算力优势明显。

工控机
四、上位机+下位机的运动控制方式
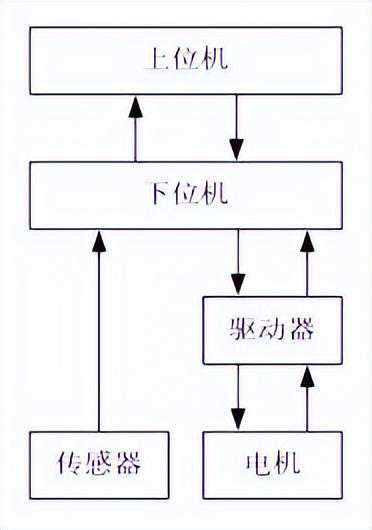
上位机+下位机的控制架构